儂乕儉 < 僎乕儉偮偔傠乕両 < DirectX媄弍曇
偦偺56 僇儊儔偺帇慄偱堏摦丒夞揮偟偰傒傛偆
丂僎乕儉偺悽奅傪愗傝庢傞乽僇儊儔乿丅3D偺僉儍儔僋僞偑摦偒夞傞悽奅偱偼丄僇儊儔偼屌掕偝傟偰偄傞偐丄僉儍儔僋僞偺屻傠傕偟偔偼懁柺傪捛廬偡傞偺偑捠椺偱偡丅屌掕僇儊儔偲懁柺捛廬僇儊儔偼戝掞Y-UP乮僉儍儔僋僞偺嬻曽岦偲堦抳乯偱偡丅屻曽僇儊儔傕Y-UP偱偟傚偆丅偨傑偵恀忋偐傜偺塮憸偵側傞帠偑偁傝傑偡偑丄偙偺帪偼僉儍儔僋僞偺恑峴曽岦偱偁傞Z幉傪忋偲偡傞Z-UP僇儊儔偵曄傢偭偨傝傕偟傑偡丅
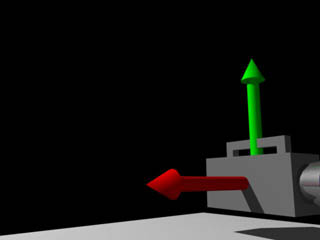
丂堦曽偱丄偦偆偄偆姶妎偲偼傑偨堘偆僇儊儔傕偁傝傑偡丅戙昞椺偼愴摤婡偺僐僢僋僺僢僩偐傜挱傔偨僇儊儔偱偡丅偙傟偼傕偆偳偪傜偑嬻偐傕傢偐傜側偄傛偆側忬懺偱嬻娫拞傪廲墶柍恠偵摦偒夞傝傑偡丅暿偺椺偱丄儌僨儖價儏乕儚偱巊傢傟傞僇儊儔側偳偼偁傞拲帇揰傪拞怱偲偟偰帺暘偑夞揮偡傞傛偆側嫇摦偵側傝傑偡丅
丂Up儀僋僩儖偑屌掕偟偰偄傞僇儊儔傕丄偦偆偱側偄僇儊儔傕偳偪傜傕巊偄彑庤偑偁傝傑偡偑丄屻幰懁偺僇儊儔偵偮偄偰偼慜幰懁傎偳忣曬偑柍偄傛偆偵巚偄傑偡丅偦偙偱偙偺復偱偼丄Up儀僋僩儖偑傔傑偖傞偟偔曄傢傞帺桼搙偺崅偄乽僇儊儔偺帇慄偱偺堏摦丒夞揮乿偵偮偄偰帋峴嶖岆偟偰傒傑偡丅
嘆 僇儊儔偺尒偨栚偐傜偝傜偵堏摦丒夞揮
丂庡恖岞帇揰偺FPS側偳偱偼丄僇儊儔偺尒偨栚偑拞怱偱偡丅椺偊偽栚偺慜偵抏偑旘傫偱偒偨帪丄偦傟傪偐傢偡偨傔偵僐儞僩儘乕儔偺塃傪偄傟傑偡偹丅僎乕儉傪偟偰偄偰嬌乆帺慠側斀墳偱偡丅偙偺帪僇儊儔偼儚乕儖僪偱偳偺曽岦偵堏摦偡傞偐丠偲偄偆偲丄偙傟偼XY暯柺偵暯峴側偳偺曽岦偱傕惉傝棫偭偰偟傑偄傑偡丅偩偭偰丄摦偔曽岦偼丄僇儊儔偺尒偨栚偺妏搙偱寛傑傞傢偗偱偡偐傜丗
丂忋偺2戜偺僇儊儔偵偲偭偰丄塃曽岦偲偼愒偄栴報乮僇儊儔偺X幉乯偱偡丅
丂僇儊儔偺尒偨栚偱塃偵峴偒偨偄応崌丄偙偺愒偄幉偵増偭偰摦偄偰D3DXMatrixookAtLH娭悢傪巊偭偰ゥ苽鈧鑲絺瓊葌鑲軅穫獊A偱偼僇儊儔偺Z幉偱偛傠傫偲夞揮偡傞偲偄偆傛偆側摦偒偑擖傞偲偐丄庱傪偆傫偆傫偲怳傞偲偐丄暋嶨側摦偒偑壛傢傞偲偟偨傜偳偆偱偟傚偆丅儚乕儖僪嬻娫偵偁傞Z幉偼乽擟堄幉乿偱偡丅偦偺夞揮偲側傞偲ゥ獋獟蓚瓊葌羵膫祩軅軅穪B
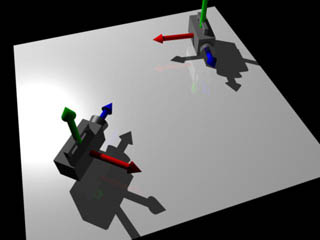
丂僇儊儔傪捠偟偰傒偰偄傞悽奅偱偼丄悽奅偺拞怱偼帺暘帺恎丄偮傑傝僇儊儔帺恎偱偁傝丄曽岦偼僇儊儔偺幉偑婎杮乮婎掙乯偲側傝傑偡丅偙偺悽奅偱偼丄塃偵峴偔偺偼娙扨偱偡丅悽奅傪帺暘偺嵍曽岦偵摦偐偣偽偄偄傫偱偡偐傜丅Z幉偱僑儘儞傕娙扨丅Z幉夞傝偺夞揮峴楍傪嶌傞偩偗偱偡乮夞揮曽岦偼媡偵偟傑偡乯丗
忋恾偺嵍壓僇儊儔偐傜偺栚慄丅僇儊儔偺悽奅偱偼帺暘偑塃偵峴偔偙偲偼
悽奅傪乽偙偺悽奅偱乿嵍偵摦偐偡帠偲摨偠偱偡丅
丂儚乕儖僪傪僇儊儔偺悽奅偵帩偭偰偄偔偺偼乽價儏乕峴楍乿偱偡丅偮傑傝丄價儏乕峴楍傪捠偟偨屻偺儌僨儖偵懳偟偰丄偝傜偵嵍曽岦堏摦傗Z幉夞揮傪妡偗傞偲丄偦傟偼僇儊儔傪捠偟偰尒偨悽奅偺堏摦偲側傝傑偡丗
丂偙偆偟偰弌棃偨乽怴偟偄價儏乕峴楍乿傪僨僶僀僗偵僙僢僩偡傟偽丄僇儊儔帺恎偺悽奅傪拞怱偲偟偰摦偔僇儊儔偺弌棃忋偑傝偱偡丅偙偺峫偊曽偼僎乕儉傪嶌傞忋偱偲偭偰傕戝愗偱偡丅
嘇 拲帇揰傪拞怱偵帺暘傪夞揮偝偣偰傒傞乮媴柺懇敍僇儊儔乯
丂儌僨儕儞僌僣乕儖側偳偱偼丄懳徾偲側傞儌僨儖乮拲帇揰乯偵懳偟偰僇儊儔偑恖岺塹惎偺傛偆偵偖傞偖傞偲夞傝傑偡丅偙偺帪丄嬻曽岦丄偄傢備傞Up儀僋僩儖偑(0, 1, 0)偱屌掕側傜偽丄ID3DXMatrixLookAtLH娭悢傪巊偊偽朷傓價儏乕峴楍傪摼傜傟傑偡丅偟偐偟丄Up儀僋僩儖偑Y-UP偱屌掕偝傟傞偲丄椺偊偽儌僨儖傪恀壓傗恀忋偐傜尒傞帠偑偱偒傑偣傫丅帇慄偲Up儀僋僩儖偑廳側傞偨傔偵巔惃偑掕傑傜側偄偨傔偱偡丅
丂偦偙偱丄偙偙偱偼拲帇揰傪拞怱偲偡傞媴柺忋傪堏摦偟側偑傜偦偺巔惃傕崗乆偲曄壔偝偣傞僇儊儔傪峫偊偰傒傑偡丅
丂儚乕儖僪嬻娫偵偁傞敿宎r偺媴偺拞怱偵拲帇揰偑偁傞偲偟傑偡丅僇儊儔偼偦偺媴柺忋偵埵抲偡傞偲偟傑偡丅峫偊傗偡偔偡傞偨傔偵乽拲帇揰嬻娫乿偲偄偆偺傪愝偗傑偡丅偙傟偼拲帇揰偑尨揰偵偁傞嬻娫偱偡丅偙偺嬻娫偱峫偊傞偲丄僇儊儔偺Z幉偼帺暘偺埵抲偐傜忢偵拞怱偺拲帇揰偵岦偔儀僋僩儖偵側傝傑偡丅
丂拲帇揰嬻娫偱偺埵抲嵗昗偲Z幉偑掕傑傞偲丄僇儊儔偼偁傞埵抲偐傜拲帇揰傪尒側偑傜Z幉夞揮偑偱偒傞傛偆偵側傝傑偡丅偨偩丄偙偺抜奒偱偼僇儊儔偺X幉乮塃曽岦乯媦傃Y幉傪掕傔傜傟傑偣傫丅偦偙偱弶婜巔惃傪僾儘僌儔儅偑梌偊傑偡丅忦審偼Z幉偵懳偟偰悅捈偱偁傞帠偩偗偱偡丅
丂僇儊儔偺弶婜埵抲偲3幉偺弶婜巔惃偑寛傑傞偲丄偦偺僇儊儔傪拞怱偲偟偨堒搙宱搙慄傪昤偔帠偑偱偒傞傛偆偵側傝傑偡丅僀儊乕僕偡傞側傜丄僇儊儔偺崱偺埵抲傪愒摴忋偺宱搙0搙偺埵抲偩偲巚偭偰壓偝偄丅僇儊儔偺X幉偼愒摴偵暯峴偱丄Y幉偼宱搙慄乮巕屵慄乯偵暯峴偱偡丅
丂偙偺弶婜忬懺傪僇儊儔巔惃峴楍偲偟偰傑偲傔傑偡丅3幉偺巔惃乮儚乕儖僪嬻娫幉乯傪1乣3峴栚偵懪偪崬傒傑偡丅4峴栚偼巊偄傑偣傫丗
D3DXMATRIX CamMat;
D3DXMatrixIdentity( &CamMat );
memcpy( CamMat.m[0], &D3DXVECTOR3( 1, 0, 0 ), sizeof( D3DXVECTOR3 ) );
memcpy( CamMat.m[1], &D3DXVECTOR3( 0, 1, 0 ), sizeof( D3DXVECTOR3 ) );
memcpy( CamMat.m[2], &D3DXVECTOR3( 0, 0, 1 ), sizeof( D3DXVECTOR3 ) );
傑偨丄媴柺忋偺埵抲儀僋僩儖傕曐帩偟偰偍偒傑偡丗
D3DXVECTOR3 CamPos( 0, 0, -100.0f ); // 揔摉偵
丂偙偺弶婜忬懺傪奿擺偟偨僇儊儔峴楍傪1僼儗乕儉暘峏怴偟偰傒傑偡丅
丂嵟弶偵僇儊儔偺Z幉夞揮傪峫偊傑偡丅夞揮曄壔偼幚偼Z幉夞揮偟偐偁傝傑偣傫丅XY幉偺夞揮傪偡傞偲僇儊儔偺帇慄偑拲帇揰傪偦傟偰偟傑偆偨傔偱偡丅Z幉偱擟堄偺妏搙夞揮偟偨帪偵丄僇儊儔偺XY幉傕堦弿偵夞揮偟偰偁偘傑偡丅偙傟偵傛傝丄僇儊儔偺怴偟偄巔惃偑妋掕偡傞傢偗偱偡丅崱僇儊儔偺Z幉偼擟堄幉偵側偭偰偄傑偡偺偱丄僋僅乕僞僯僆儞傪巊偭偰夞揮峴楍傪嶌偭偰偁偘傑偟傚偆丗
D3DXQUATERNION ZAxisQ;
D3DXQuaternionRotationAxis( &ZAxisQ, &ZAxis, angle );
D3DXMATRIX ZAxisRotMat;
D3DXMatrixRotationQuaternion( &ZAxisRotMat, &ZAxisQ );
CamMat *= ZAxisRotMat;
丂僋僅乕僞僯僆儞傪巊偆偺偑寵側応崌偼丄乽Z幉夞揮峴楍亊僇儊儔巔惃峴楍乿偱媮傔傞偲偄偆偺傕偁傝傑偡丅偳偆偄偆帠偐偲偄偆偲丄僇儊儔嬻娫偱Z幉夞揮偝偣偰儚乕儖僪偵栠偟偰偁偘偰偄傞傢偗偱偡乮僇儊儔偺巔惃峴楍偼價儏乕峴楍偺媡峴楍偱偡乯丗
D3DXMATRIX ZRotMatV;
D3DXMatrixRotationZ( &ZRotMatV, angle );
CamMat = ZRotMatV * CamMat;
丂偄偢傟偺曽朄偱傕丄僇儊儔偺Z幉夞揮偱巔惃偑峏怴偝傟傑偡丅
丂懕偄偰丄怴偟偄巔惃傪婎弨偲偟偨堒搙宱搙忋乮媴柺忋乯偺嵎暘堏摦傪峴偄傑偡丅堏摦偼僇儊儔偺幉傪婎掙偲偟偨儀僋僩儖D偱曽岦傪巜掕偟傑偡丅椺偊偽D( Dx, Dy, 0 )偩偲偟傑偟傚偆丅偙偺儀僋僩儖傪拲帇揰偺嬻娫偵栠偟傑偡丅偙傟偼儀僋僩儖D偵僇儊儔偺巔惃傪妡偗傞偩偗偱偡丅
D3DXVECTOR3 D( Dx, Dy, 0 ); // Dx,Dy偼揔摉偵
D3DXVECTOR3 DL;
D3DXVec3TransformCoord( &DL, &D, &CamMat );
偙傟偱壗偑傢偐傞偺偐丠偦傟偼乽夞揮柺乿偱偡丅僇儊儔偼忢偵拲帇揰傪岦偄偰偄傑偡丅傛偭偰丄夞揮柺偵偼偐側傜偢僇儊儔偺Z幉偑娷傑傟傑偡丅柺傪掕傔傞偵偼Z幉偲廳側傜側偄傕偆1偮偺曽岦偑昁梫偱丄愭偺儀僋僩儖DL乮拲帇揰嬻娫偺曽岦儀僋僩儖乯傪掕傔偨帠偱丄夞揮偡傋偒柺偑堦堄偵側偭偨傢偗偱偡丅
丂夞揮柺偑傢偐傟偽夞揮幉傪媮傔傜傟傑偡丗
D3DXVECTOR3 RotAxis;
D3DXVECTOR3* CamZAxis = (D3DXVECTOR3*)CamMat.m[2];
D3DXVec3Cross( &RotAxis, &DL, CamZAxis );
丂偙偺夞揮幉偲揔摉側夞揮妏搙傪梡偄偰堒搙宱搙堏摦梡偺夞揮僋僅乕僞僯僆儞傪嶌傝丄夞揮峴楍傪媮傔傑偡丅偦傟傪尰嵼偺僇儊儔偺埵抲偵揔梡偟傑偡丗
D3DXQUATERNION TransQ;
D3DXQuaternionRotationAxis( &TransQ, &RotAxis, angle );
D3DXMATRIX TransRotMat;
D3DXMatrixRotationQuaternion( &TransRotMat, &TransQ );
D3DXVec3TransformCoord( &CamPos, &CamPos, &TransRotMat );
丂偝偰丄偙偆偟偰僇儊儔偺埵抲偑堏摦乮幚嵺偼暯峴堏摦乯偟偰偟傑偆偲丄愭傎偳偺巔惃偺傑傑偱偼僇儊儔偑拲帇揰傪岦偐側偔側傝傑偡丅偙傟傪曗惓偟傑偡丅僇儊儔偺怴偟偄Z幉偼崱偺埵抲偐傜尨揰傪岦偔儀僋僩儖偱偡丅X幉偲Y幉偼傑偨晄掕偵側偭偰偟傑偄傑偟偨丅偦偙偱慜偺Y幉偺曽岦傪婎弨偵偟偰丄怴偟偄X幉偺曽岦傪奜愊偱媮傔傞帠偵偟傑偡丅Y幉偼ZX幉偺奜愊偱媮傔傑偡丗
D3DXVECTOR3 X, Y, Z;
Z = -CamPos;
D3DXVec3Normalize( &Z, &Z );
memcpy( &Y, CamMat.m[1], sizeof( D3DXVECTOR3 ) );
D3DXVec3Cross( &X, &Y, &Z );
D3DXVec3Normalize( &X, &X );
D3DXVec3Cross( &Y, &Z, &X );
D3DXVec3Normalize( &Y, &Y );
D3DXMatrixIdentity( CamMat );
memcpy( CamMat.m[0], &X, sizeof( D3DXVECTOR3 ) );
memcpy( CamMat.m[1], &Y, sizeof( D3DXVECTOR3 ) );
memcpy( CamMat.m[2], &Z, sizeof( D3DXVECTOR3 ) );
丂偙傟偱丄僇儊儔偺怴偟偄巔惃偲埵抲偑掕傑傝傑偟偨丅偟偐偟丄僇儊儔偺墱峴偒曽岦傕峫椂偟偨偄偼偢偱偡丅偙傟偼娙扨偱丄怴偟偄埵抲傪尨揰曽岦偵僆僼僙僢僩偡傟偽椙偄傫偱偡丅尨揰曽岦偼僇儊儔偺Z幉偱偡偐傜丄
D3DXVECTOR3* CamZAxis = (D3DXVECTOR3*)CamMat.m[2];
CamPos += Offset_Z * (*CamZAxis);
偱墱峴偒曽岦偵揰偑堏摦偟傑偡丅
丂偙偙偐傜價儏乕峴楍傪媮傔傞偵偼丄僇儊儔巔惃峴楍偵埵抲傪壛偊偨僇儊儔峴楍傪嶌傝丄偦偺媡峴楍傪嶌惉偡傞偩偗偱偡丅
丂僾儘僙僗傪傑偲傔傑偡偲丄
丒 尰嵼偺Z幉傪拞怱偲偟偰夞揮 仺 巔惃峏怴
丒 僇儊儔傪拞怱偲偟偨堏摦曽岦寛掕 仺 夞揮柺妋掕
丒 僇儊儔埵抲峏怴
丒 巔惃峏怴
丒 僇儊儔峴楍傪嶌傝丄偦偺媡峴楍偱價儏乕峴楍傪嶼弌
偲偡傞偙偲偱丄拲帇揰傪尒偮傔側偑傜偖傞偖傞夞揮偡傞僇儊儔偑偱偒傑偡丅
嘊 僒儞僾儖僾儘僌儔儉
丂杮復偱徯夘偟偨僇儊儔偺摦偒傪偡傞僒儞僾儖僾儘僌儔儉傪偙偪傜偱岞奐偟偰偍傝傑偡丅ViewerCamera偲偄偆嵟掅尷偺婡擻傪幚憰偟偨僇儊儔僋儔僗偑偁傝傑偡偺偱丄偛帺桼偵偍巊偄壓偝偄丅